Bend-twist Coupling Relationships in Beam Elements
This article describes how bend-twist coupling effects can be accounted for in Bladed beam elements. The built-in Bladed model of bend-twist coupling due to shear centre offset from the neutral axis are described. Additionally, the specification of user-defined bend-twist coupling terms is discussed.
Co-incident shear and neutral axes
If the elastic centre and shear centre coincide, the constitutive relationship between strain and internal load for a beam element can be expressed as a diagonal matrix as shown below. Note that this equation is formulated in the local element coordinate system (i.e. it is rotated according to blade structural twist, prebend and sweep).
The 6x6 constitutive matrix is referred to in this document as \(\bmatrix{\bar{\bar{C}}}\), where the double over-bar denotes the local element coordinate system.
It is also noted that this equation may easily be transformed to the local principal coordinate system if the principal axis direction is constant for successive beam elements in the blade. In this case, the principal x-axis equals the element z-axis and the principal y-axis equals the element y-axis in the opposite direction, which implies that the principal z-axis equals the element x-axis (neutral axis). Further details of the relation between the local principal coordinate system and the element coordinate system may be found in the technical document 110052-UKKBR-T-31-B with the title “Orientation of blade local element frame relative to the blade root coordinates”.
Translational offset between neutral and shear axes
Optional by selecting “ignore blade shear centre axis orientation transformation” in Additional Items.
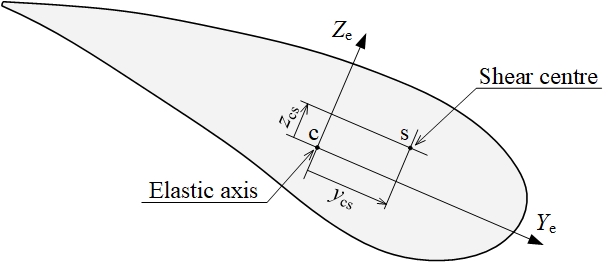
It is possible to define a translational offset between the neutral axis and the shear centre within the blade section, as illustrated in Figure 1.
Figure 1: Shear centre offset from neutral axis
The translational offset between shear and neutral axes is taken into account using the following calculation, which transforms the shear properties onto the neutral axis position.
Entries \(\bscalar{y_{cs}}\) and \(\bscalar{z_{cs}}\) define the position of the shear centre relative to the neutral axis.
Expanding the above expression gives the following constitutive relationship around the neutral axis. The effect of shear centre offset is to introduce additional coupling between shear strain and torsional moment, and between bending strain and shear force.
where, \({\bscalar{GI}}_x={{\bscalar{GI}}_x}^\ast+\ {\bscalar{GA}}_yz_{cs}^2+\ {\bscalar{GA}}_zy_{cs}^2\) and \({{\bscalar{GI}}_x}^\ast\) is the torsional stiffness defined around the shear (torsional) axis.
Translation and orientation offset between neutral and shear axes
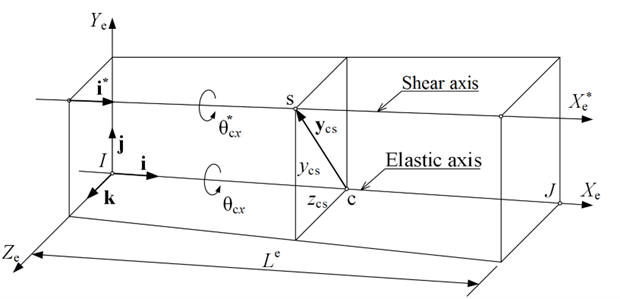
In general, the elastic and shear axes are not parallel, so it can be important to take account of the orientation difference between them. The orientation difference between the shear axis and the elastic axis is illustrated by the \(\theta\) terms in Figure 2.
Figure 2: Orientation difference between shear and elastic axes
The combined translational and orientation offset between shear and neutral axes is taken into account using the following calculation, which transforms the shear properties onto the neutral axis position.
Entries \(\bscalar{\Delta y_{cs}}\) and \(\bscalar{\Delta z_{cs}}\) describe the change in position of the shear centre within the beam element, in order to describe the shear axis orientation.
The effect of shear centre translation and orientation offset is to introduce additional coupling between bending and torsional moments, resulting in the following constitutive relationship around the neutral axis.
and \({{\bscalar{GI}}_x}^\ast\) is the torsional stiffness defined around the shear (torsional) axis. This transformation results in extra bend-twist off–diagonal coupling terms, as well as a change to the torsional stiffness around the neutral axis.
User-defined bend-twist coupling
The user can directly add extra off-diagonal terms to the constitutive matrix as shown
The transformations described in previous sections based on shear axis position relative to neutral axis are also applied, resulting in the following relationship by selecting the option “ignore blade shear centre axis orientation transformation” in Additional Items.
It is noted that the transformation of these equations to the local principal coordinate system as described in Co-incident shear and neutral axes will introduce a change of the sign of the off-diagonal terms that relate to bending about the element y-axis.